是Elektrobit Automotive公司刚刚上传的综述文章(2019/10/17),其安全性的讨论很有启发。
本文目的是研究自动驾驶中深度学习技术的最新技术。首先介绍基于AI的自动驾驶架构、CNN和RNN、以及DRL范例。这些方法为驾驶场景感知、路径规划、行为决策和运动控制算法奠定基础。该文研究深度学习方法构建的模块化“感知-规划-执行”流水线以及将传感信息直接映射到转向命令的端到端系统。此外,设计自动驾驶AI架构遇到的当前挑战,如安全性、训练数据源和计算硬件等也进行了讨论。该工作有助于深入了解深度学习和自动驾驶AI方法的优越性和局限性,并协助系统的设计选择。
关注文章公众号
对话框回复“paper9”获取本篇论文
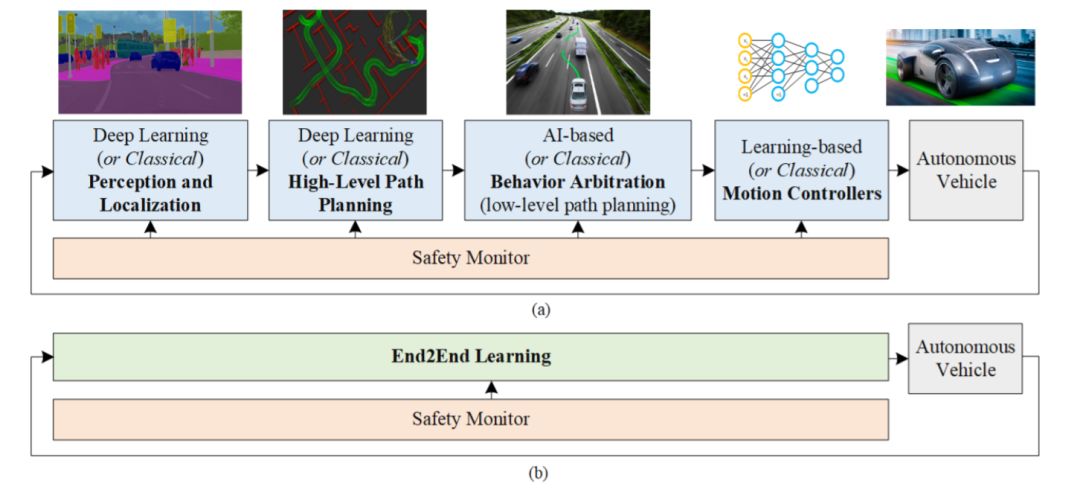
如图所示,基于深度学习的自动驾驶汽车。该体系结构既可以实现为串行“感知-规划-执行”流水线(a),也可以实现为端到端系统(b)。在串行流水线中,可以使用AI和深度学习方法或基于经典的非机器学习方法来设计组件。端到端学习系统主要基于深度学习方法。这两种方案,通常都设计一个安全监视器来确保每个模块的安全。
模拟学习(Imitation learning)和深度强化学习(DRL)
学习控制器(Learning controller):迭代学习控制(ILC)和模型预测控制(MPC)
推理深度学习技术安全性的要求有以下几点:
不管各种经验定义和安全性解释如何,在安全关键系统中深度学习组件仍然是一个悬而未决的问题。道路车辆功能安全ISO 26262标准提供了确保安全的全面要求,但并未解决基于深度学习软件的独特特征。
标准ISO 26262建议用危害分析和风险评估(HARA,Hazard Analysis and Risk Assessment)方法识别系统中的危害事件并指定减轻危害的安全目标。该标准有10个部分。重点是第6部分:软件级别的产品开发,遵循众所周知的V-工程模型标准。汽车安全完整性等级(ASIL,Automotive Safety Integrity Level)是指ISO 26262中某个汽车系统项目(例如子系统)定义的风险方案分类。
ASIL代表降低风险所需的严格程度(例如,测试技术,所需文档的类型等),其中ASIL D代表最高风险,ASIL A代表最低风险。如果一个元素分配给质量管理(QM,Quality Management),那么它不需要安全管理。给定危害评估的ASIL首先分配给旨在解决该危害的安全目标,然后该目标得出的安全要求才接受该目标。
根据ISO26226,危害(Hazard)被定义为“由故障(malfunctioning)行为引起的潜在伤害源,伤害指人身伤害或对人体健康的损害”。但是,深度学习组件可能会造成新的危险类型。
由于复杂性,深度学习组件可能会以特有的方式失败。例如,在深度强化学习系统中,奖励函数的错误可能会对训练后的模型产生负面影响。这种情况下,自动驾驶汽车会发现,某些传感器漏洞(sensor vulnerabilities)让它看不到距离其他汽车有多近,从而避免了因距离太近而被惩罚。尽管此类危险可能是深度强化学习组件所特有的,但故障仍可以追踪到,因此适合ISO 26262的现有准则。
一个分析深度学习组件安全性的关键要求是,检查其结果的直接人工成本是否超过某些危害严重性阈值。从人看,不希望有的结果确实是有害的,并且其作用几乎是实时的。这些结果可以归类为安全问题。深度学习决策的成本与包含明确损失函数L的优化目标有关,即训练误差函数。
实际上,机器学习系统仅遇到有限数量的测试样本,而实际操作风险是测试集的经验量化值。即使算法假设是风险最优的,操作风险也可能比小基数(cardinality)测试集的实际风险大得多。测试集实例引起的不确定性,可能对单个测试样本具有很大的安全隐患。
编程组件的故障和失败(例如采用算法求解问题的组件)与深度学习组件完全不同。深度学习组件的特定故障可能由不可靠或噪声传感器信号(恶劣天气下的视频信号、吸收建筑材料的雷达信号和GPS数据等)、神经网络拓扑结构、学习算法、训练集或意外引起的环境变化(例如未知的驾驶场景或道路事故)造成。自动驾驶车辆必须具有故障安全(fail-safe)机制,通常由称为安全监控器(Safety Monitors)实现。一旦检测到故障,它们必须停止自主控制软件。
训练集在深度学习组件的安全性中起关键作用。ISO 26262标准规定,应充分规定组件性能(component behavior),并根据其规格对每个修正进行验证。深度学习系统中用训练集代替规范,这违反了该假设。目前尚不清楚如何确保相应的危害始终得到减轻。训练过程不是验证过程,因为训练模型取决于训练集。
应当制定详细的要求并能追踪到危害,这样可以指定如何获得训练集、验证集和测试集。随后,按照这个规范收集的数据得到验证。此外,用某些规范(例如,车辆不能超过3米的事实)来丢弃误报(false positive detections)。
对于将安全视为关键的系统,即使其完整的安全性保证仍然是一个悬而未决的问题,机器学习和深度学习技术还是变得要有效和可靠。汽车行业当前的标准和法规无法被完全映射到此类系统,因此需要开发针对深度学习的新安全标准。
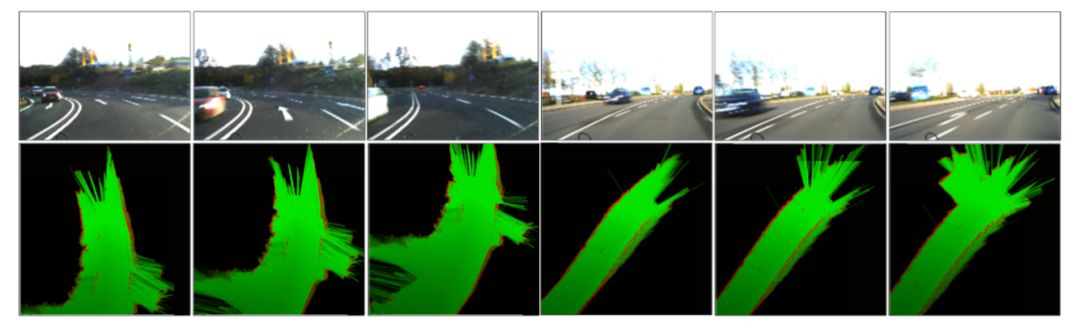
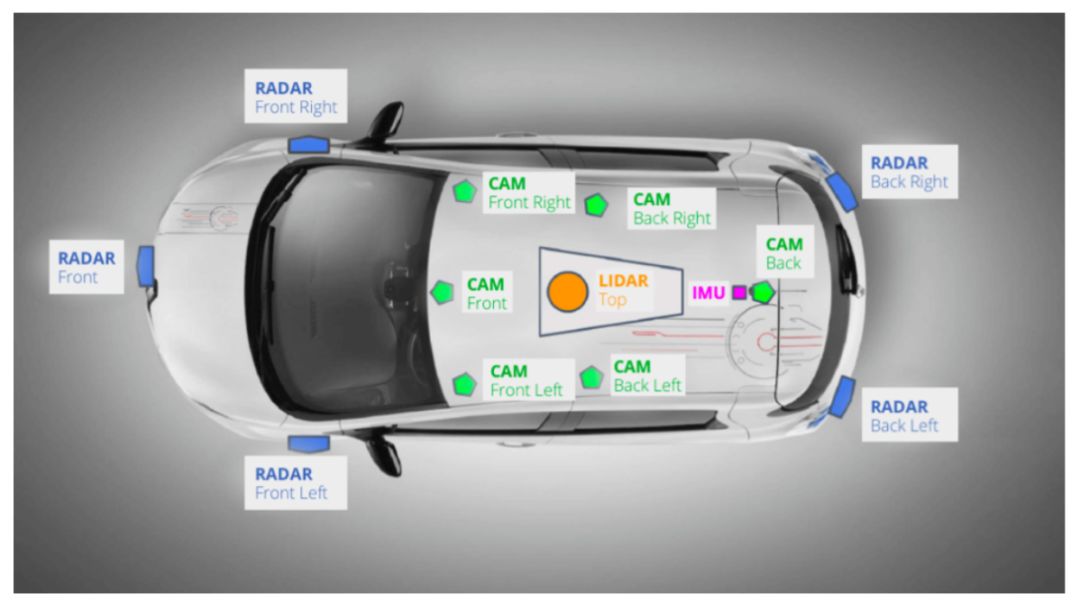
现实世界的数据,是培训和测试自动驾驶组件的关键要求。组件开发阶段需要大量数据,需要在公共道路上收集数据。为了获得对驾驶场景的全面描述,数据收集的车辆配备各种传感器,例如雷达、激光雷达、GPS、摄像机、惯性测量单元(IMU)和超声波等,如图所示。
Nvidia的Drive PX,Renesas的R-Car。
评论:感觉除了“安全性”部分,其他部分不是很有货。
@知乎:黄浴
版权声明
本文转载来源:知乎-黄浴,转载请自行联系
点击文末阅读原文 或 扫描图片二维码了解更多大会信息

 ai论文查重
ai论文查重

